Особенности управляемых систем
Одна из характерных особенностей управляемой кибернетической системы - способность изменять свое движение
, переходить в разные состояния под влиянием различных управляющих воздействий. Всегда существует некоторое множество движений, из которых производится выбор предпочтительного движения. Где нет выбора, там нет и не может быть управления.
Таким образом, управляемые системы рассматриваются не в статическом состоянии, а в движении и развитии, что коренным образом изменяет подход к их изучению и в ряде случаев позволяет вскрыть закономерности, установить факты, которые иначе оказались бы не выявленными. Устойчивость как функциональное свойство управляемых систем, имеющее решающее значение для оценки работоспособности систем, было бы невозможным без уяснения динамики происходящих в них процессов.
Как уже отмечалось, управляемая система постоянно находится в движении, ей присущ динамический характер. Термин "движение" хорошо известен из механики, где он означает изменение положения какого-либо объекта в пространстве с течением времени. В кибернетике движение имеет более общий смысл, а именно: всякое изменение объекта во времени. Движением называется, например, изменение температуры тела, заряда конденсатора, объёма или давления газа, суммы текущего счёта в банке, запасов сырья на складе, наконец, жизнь и мышление.
Все объекты, явления и процессы в природе взаимосвязаны
и влияют друг на друга, поэтому, выделяя какой-либо объект, необходимо учесть влияние среды на объект и объекта на среду. Следовательно, изучение поведения любой управляемой системы производится с учетом ее связей со средой.
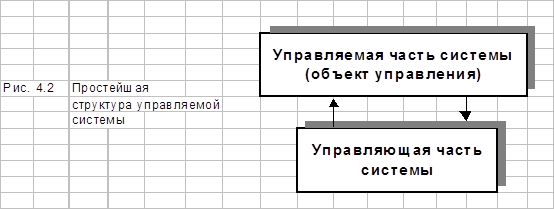
В управляемых системах всегда присутствует орган, осуществляющий функции управления. В этом случае систему можно схематически представить в виде совокупности управляющей
и управляемойчастей (смотри рис.4.2). На рисунке стрелками указаны направления воздействий, которыми обмениваются части системы.
|
Заметим, что указанные простейшие управляемые системы никогда не являются изолированными. Они взаимодействуют с внешней средой, друг с другом, могут составлять более сложные системы, входящие в качестве элементов в управляемые и управляющие части сложных систем и образующие иерархию управляемых систем. Принцип иерархичности управления - это принцип многоступенчатого построения управляющих систем, при котором функции управления распределяются между соподчинёнными частями системы. Управляющие сигналы устройств старшего ранга носят обобщённый характер и конкретизируются в подчинённых устройствах.
Движение системы, изменение её состояния могут происходить под влиянием как внешних воздействий, так и в результате процессов, происходящих внутри системы. На каждую систему, строго говоря, оказывает влияние бесчисленное множество внешних воздействий, но далеко не все они существенны. Из множества воздействий отбирают лишь те, которые в условиях решаемой задачи существенно влияют на состояние системы. Эти внешние воздействия называют входными
величинами (входными воздействиями, входными переменными системы), а элементы системы, к которым приложены входные воздействия - входами системы.
Так, на движение самолета существенно влияют следующие факторы: сила и направление ветра, плотность атмосферы, положение рулей, тяговые усилия двигателей. Все они рассматриваются как входные воздействия на самолет.
Для решения задач управления выделяют два типа входных величин: управляющие
воздействия X
и возмущающиевоздействия M
(рис.4.3). К управляющим относятся такие величины, значениями которых можно распоряжаться при управлении системой и которые можно изменять с целью осуществления движения, предпочтительного по сравнению с другими возможными движениями управляемой системы. В приведенном примере управляющими воздействиями являются воздействия, создаваемые рулевыми плоскостями, и тяговые усилия двигателей, которые пилот изменяет по своему усмотрению. Возмущающие воздействия - влияние ветра и плотности атмосферы на движение самолета.