Особенности управляемых систем
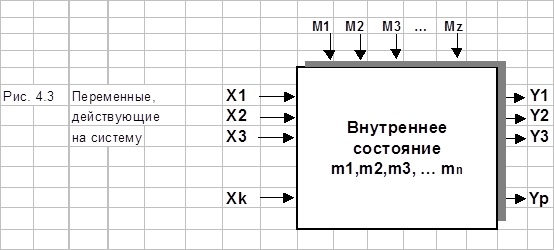
Воздействие системы на окружающую среду характеризуется значениями ее выходных
величин Y
(см. рис. 4.3). Совокупность выходных величин и их изменения определяют поведение системы, позволяют руководителю оценивать соответствие движения системы целям управления. При управлении движением самолета выходными величинами служат курс и скорость движения, поскольку значения этих величин характеризуют цель управления, которая состоит в том, чтобы обеспечить прибытие самолета в заданное место и время.
Изменение входных величин, как правило, вызывает изменение выходных величин. При этом изменения последних не всегда проявляются сразу: они могут запаздывать, но никогда не опережают изменения входных величин, которые - следствие, а входные - причина движения системы.
Возмущающие воздействия, влияющие на движение системы, могут иметь не только внешнее, но и внутреннее происхождение, например, изменение свойств элементов системы после длительной работы или в результате нарушения нормального функционирования элементов системы.
Состояние любой системы с заданной точностью можно охарактеризовать совокупностью значений величин m
, определяющих ее поведение, т.е. переменными состояния
систем.
Эти величины позволяют сравнивать состояния отдельных систем и судить об их различии, сравнивать состояния одной и той же системы в произвольные моменты времени для выяснения ее движения. Из всевозможных форм описания состояния системы наибольший интерес представляет способ, основанный на понятии пространства состояний
системы. Пространством состояний системы называется многомерное пространство, в котором каждое состояние системы изображается точкой, называемой изображающей точкой (она “изображает” данное состояние системы), координаты которой - переменные состояния системы m1
,m2,
.,mn
.
В реальных системах не все координаты могут изменяться в неограниченных пределах. Большая часть координат принимает значения, лежащие в ограниченном интервале
m
'i
< mi
< m
"i
,
где m
'i
и m
"i- границы интервала возможных значений координаты m
i.
Область пространства состояний, в которой находится изображающая точка, называется областью допустимых состояний
. Говоря о пространстве состояний, имеют в виду лишь его допустимую область. Однако даже в ней не всегда любая точка изображает возможное состояние системы. Таким свойством обладает лишь непрерывноепространство состояний, соответствующее системе, координаты которой принимают любые значения (в допустимых пределах). Существуют системы (дискретные
), в которых координаты принимают конечное число фиксированных значений. Пространство состояний этих систем также дискретно.
Для характеристики движения системы разделим все переменные на три группы:
* входные переменные, или входные воздействия X
и M
, представляющие сигналы, генерируемые системами, внешними по отношению к исследуемой системе, и влияющие на ее поведение;
* выходные переменные или переменные, характеризующие реакцию системы Y
, и позволяющие описать некоторые аспекты поведения системы, представляющие интерес для исследователя;
* переменные (координаты) состояния m
, характеризующие динамическое поведение исследуемой системы.
|
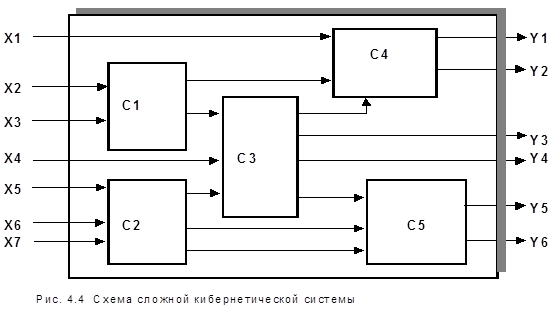
Учитывая относительность понятия, кибернетическую систему можно рассматривать как состоящую из частей (элементов), взаимодействующих друг с другом (рис. 4.4). В этом случае большинство выходных величин одной части одновременно являются входными величинами для другой части системы. Оставшиеся каналы остаются свободными, составляя входы и выходы всей системы в целом.