Особенности управляемых систем
Движение системы представляют как цепь преобразований ее состояний. С одной стороны, можно полагать, что переход системы из состояния a
1 в момент времени t
1 в состояние a
2 в момент времени t
2 есть результат преобразования a
1, t
1 в a
2, t
2. С другой - можно рассматривать изменение выходных величин какой-либо системы под влиянием изменений входной величины так же, как ее преобразование.
Преобразование одного объекта в другой осуществляется посредством действия на объект оператора
. Объект, подвергающийся преобразованию, называется операндом
, а результат преобразования - образом
. Пользуясь этими терминами, можно описать всякое преобразование следующим образом: в результате воздействия оператора на операнд получается образ.
При изучении выходной величины Yкак результата преобразования входной величины X
связь между Y
и Xзаписывается в форме
Y = KX
,
где K
- оператор, характеризующий свойства данной системы.
Если система выступает в виде безинерционного линейного преобразователя (например, электронный усилитель, механический редуктор, фотоэлемент), то оператор K
преобразуется в коэффициент преобразования (коэффициент передачи) и представляет собой число k
, на которое нужно умножить значение входной величины, чтобы получилось значение выходной величины преобразователя:
Y
=
kX
.
Для нелинейного безинерционного преобразователя выходная величина является функцией от входной величины, и оператор K
приобретает смысл символа F
, обозначающего определенное нелинейное преобразование:
Y = F (X).
Состояние реальной системы не может измениться мгновенно, а происходит во времени в результате переходного процесса. В этом случае оператор становится сложнее и выражается не только при помощи одних алгебраических действий над операндами. Системы, переход которых из одного состояния в другое совершается не мгновенно, а в результате переходного процесса, называются динамическими
системами.
Состояние, в котором находится система, когда ни одна из ее координат не изменяется, называется равновесным состоянием, которое наступает в некоторых точках пространства состояний.
Под переходным режимом понимается режим движения динамической системы из начального состояния к какому-либо установившемуся режиму -равновесному или периодическому.
Периодическим режимом называется режим, при котором система через равные промежутки времени приходит в одни и те же состояния.
Необходимым условием работоспособности динамических систем служит их устойчивость, характеризующая одну из важнейших черт поведения динамической системы и являющаяся важнейшим понятием в управлении. Это значит, что система должна нормально функционировать, быть нечувствительной к неизбежным посторонним возмущениям различного рода, т.е. работать устойчиво, несмотря на действие посторонних возмущений.
Для определения устойчивости разработаны соответствующие критерии, позволяющие найти условия устойчивости и необходимые ее “запасы” по косвенным признакам.
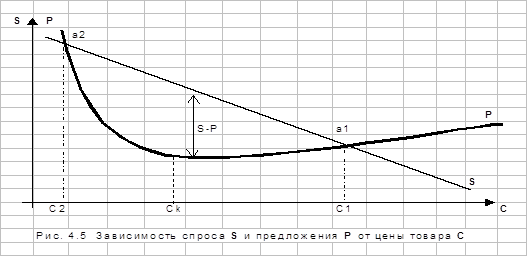
Рассмотрим понятие устойчивости динамической системы на примере системы установления цен на рынке с устойчивым и неустойчивым состоянием равновесия.
Пусть зависимости спроса -S
и предложения P
некоторого товара от цены C
на рынке имеют вид, показанный на рис. 4.5, а скорость d
изменения цены прямо пропорциональна разности между спросом и предложением:
d = k
1 (S - P),
где k
1 - коэффициент ( k
1 >0 ), указывающий, на сколько возрастет цена товара в единицу времени, если разница между спросом и предложением будет равна единице.
|